Control a Ball on Plate System
In my master thesis I controlled the position of a ball on a plate using methods from control theory and reinforcement learning (Policy Search). I investigated in designing robust controllers using multi model pole placement and H-infinity methods (using Matlab systune).
ROS, Robot Control System, OpenCV, Cpp, Matlab
→ ThesisBuilding a Ballbot

Construction, Control and Simulation of a Ballbot. This is a robot that balances on three omniwheels on a ball.
ROS, Gazebo, Matlab, CAD, Cpp
→ Simulation → Real World Tests → Detailed Description (pdf) → Git ReproPD Controller of Mass Spring Damper
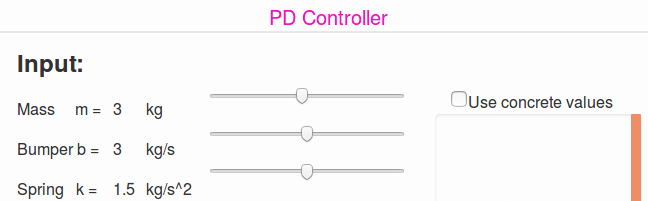
A PD controller of a mass spring damper system. With differential equations and locus curve (Ortskurve). You can adjust all parameters (mass, damper etc.) and simultaneously the differential equation is solved and the step response visualized!
Javascript, Control Theory
→ Link to siteBall Tracking (>50Hz, 1mm precision)
A fast and precise multiple Ball Tracking Alogrithm, that is able to estimate the position, velocity and acceleration of a ball with a kalman filter. The position of the ball is determined in a reltative coordinate System by Aruco Markers. The Ball is tracked by the use of rgb images. It is also shown a method that uses point-cloud data to track a ball.
ROS, OpenCV, Cpp, Intel Real sense camera used
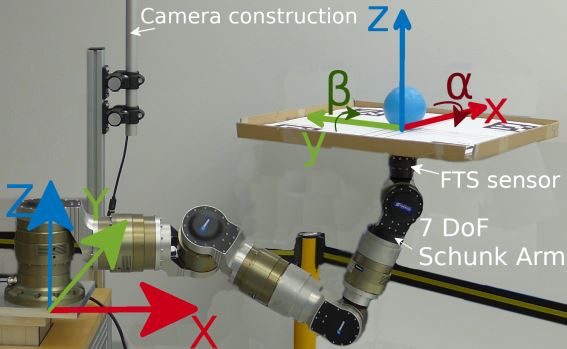
→ VideoBall on Plate System
In this project I control the position of a ball lying on a plate. The plate is controlled by a 7dof kuka arm. The position and velocity of the ball is measured by a camera.
ROS, Gazebo, OpenCV, Cpp, Matlab
→ Video → Github RepoRL Train a 4-Player Card Game
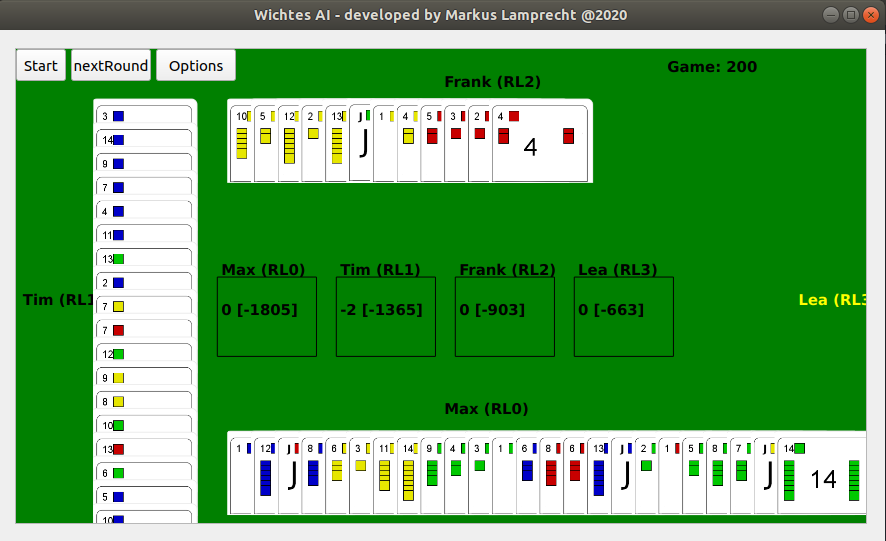
As I am a very passionate card game player, I always look for competitors. In order to learn from an expert I successfully trained an agent that wins in 95% games against random players.
Python 3.6, PyQt 5, Pytorch, twisted, Deep-Learning
→ Video